Research
My research focuses on collective adaptive systems: understanding and engineering how groups of agents can self-organize, learn, and evolve in open environments.
Core questions
- How can distributed learning and social transmission enable collective adaptation?
- How do physical constraints (collisions, morphology, energy limits) shape collective dynamics?
- How can we design robotic systems that both test biological/evolutionary hypotheses and provide new paradigms for AI?
Approach
- Cross-disciplinary methods: machine learning, evolutionary computation, evolutionary dynamics, statistical physics.
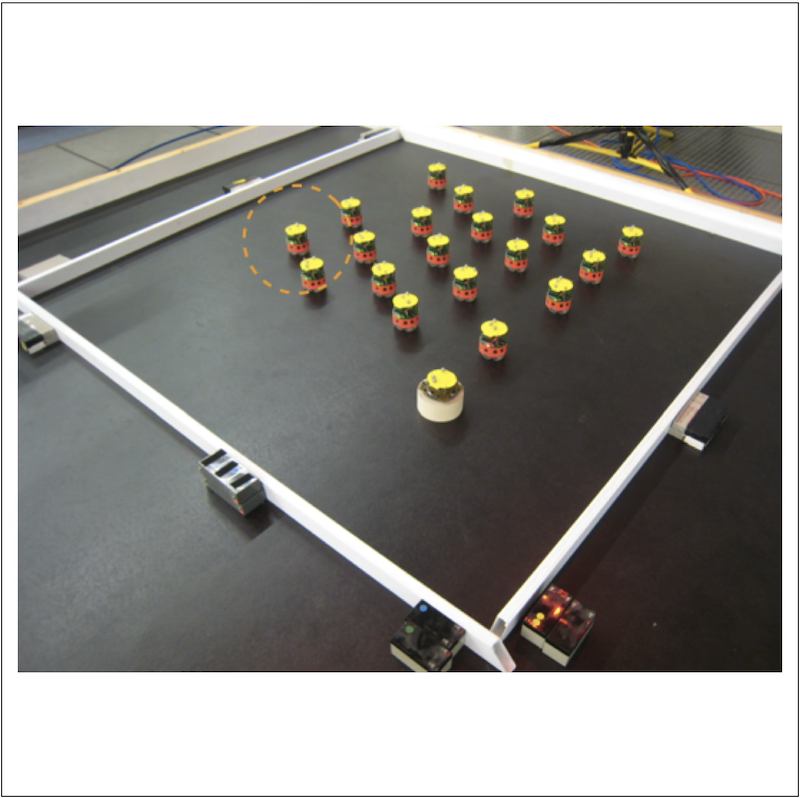
- Swarm robotics experiments: Pogobots (200+ units, made by us), Kilobots, Thymios, custom platforms.
- Simulation tools: Roborobo4 (C++/Python), agent-based numerical simulations.
Recent Research (selection)
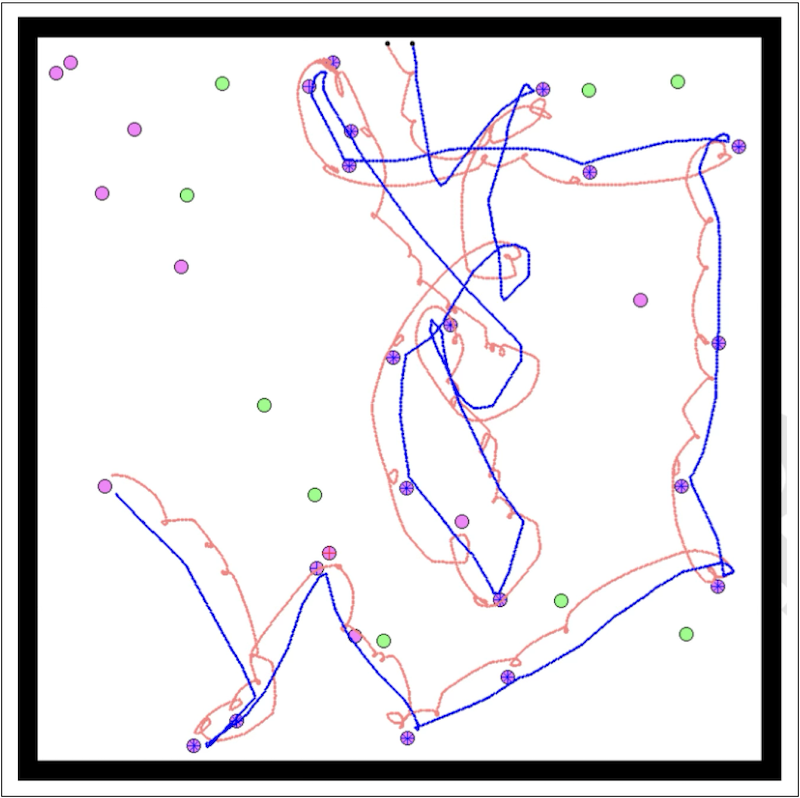
- (1) social learning with swarm robotics (1)(2)
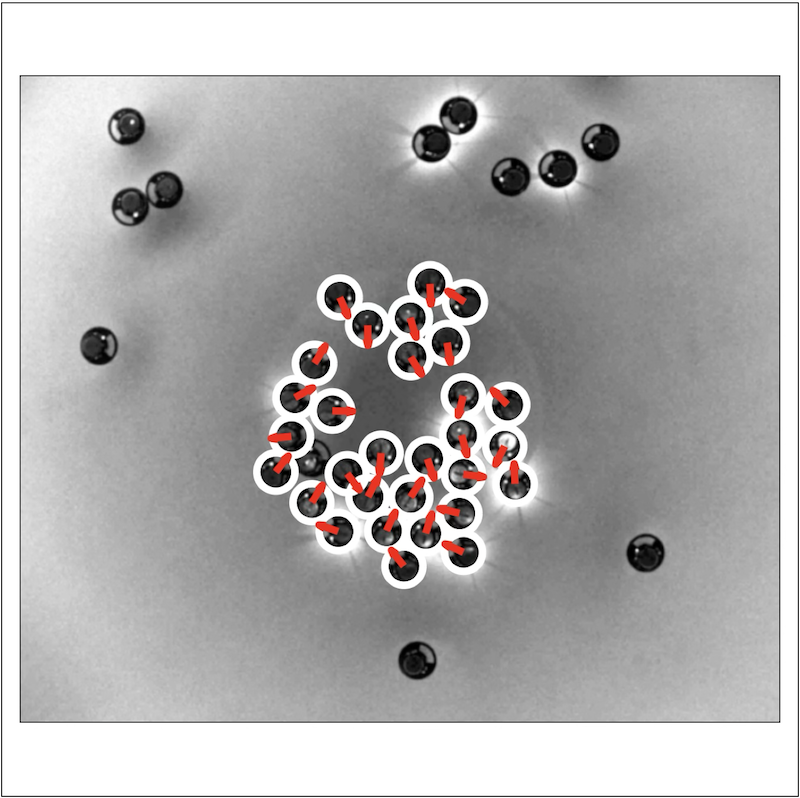
- (2) smart active matter (3)(4)
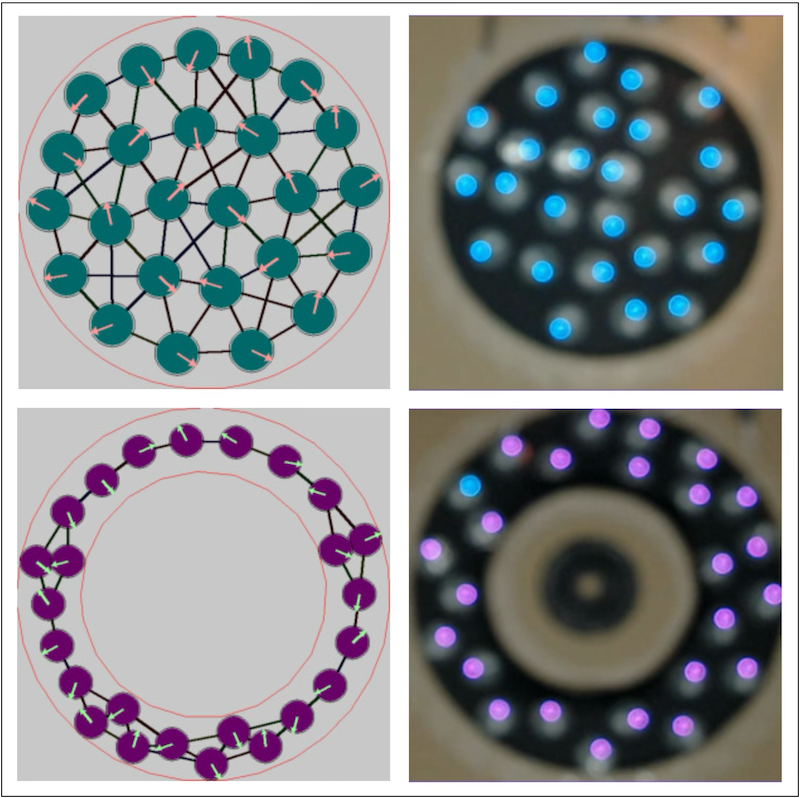
- (3) spectral methods for swarm robotics (5)
- (4) evolution of social behaviors (6)(7)(8)
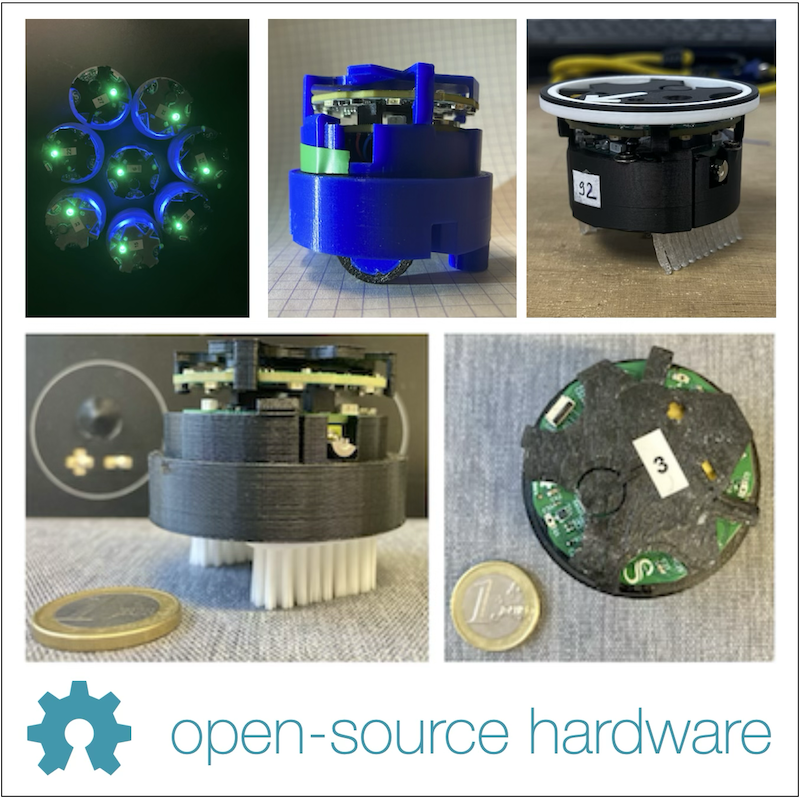
- (5) Pogobot, an open-source open-hardware platform for swarm robotics (9)(web)
Complete list of publications: Google Scholar or HAL
Postdocs and PhD Students
Current
- Jeremy Fersula (ATER, started 2025) : smart active matter and learning dynamics
- Esther Maria Zamora Sanchèz (phd, started 2025, with R. Candelier) : emergent collective decision making
- Thomas Juldo (phd, started 2025, with G. Bailly and M. Teyssier) : human-swarm interaction
- Léo Cazenille (senior post-doc, started 2024) : spectral methods in swarm robotics
- Loona Macabre (phd, started 2024, with N. Aubert-Kato) : Reaction-Diffusion-Advection models for swarm robotics
- Keivan Amini (phd, started 2024, with O. Dauchot) : smart active matter and swarm robotics
- Sébastien Bilès (phd, started 2024, with R. Candelier) : brain-body co-evolution
- Alessia Loi (phd, started 2023) : signalling and learning in swarm robotics
Past
- Dari Trendafilov (postdoc 2024 with E. Tuci) : swarm robotics, foraging, self-organization
- Maxime Toquebiau (phd 2024 with F. Ben Amar and JY Jun Kim) : multi-robot deep RL and communication
- Jérémy Fersula (phd 2023 with O. Dauchot) : smart active matter and social learning
- Nicolas Fontbonne (phd 2023 with N. Maudet) : invidual and collective learning in swarm robotics
- Yoones Mirhosseini (ing. 2020-2023) : using collision-based primitives in swarm robotics learning
- Matan Yah Ben Zion (postdoc 2020-2022) : soft-matter physics and swarm robotics
- Alexis Duburcq (phd 2022 with Y. Chevaleyre) : machine learning for exoskeleton walking gaits
- Fabien Caura (ing. 2019-2022) : pogobot hardware/firmware
- Stéphane Gourichon (ing. 2020-2021) : pogobot software
- Paul Ecoffet (phd 2021 with JB André) : evolution of partner choice
- Léo Cazenille (phd 2018 with J. Halloy) : mixed society of animals and robots
- Nathanaël Aubert-Kato (postdoc 2016-2018) : molecular programming and swarm robotics
- Arthur Bernard (phd 2016 with JB André) : evolution of cooperation
- Jean-Marc Montanier (phd 2013) : embodied evolutionary robotics
- Alexandre Devert (phd 2009 with M. Schoenauer) : generative developmental systems
- Cedric Hartland (phd 2009 with M. Sebag) : reservoir computing for evolutionary robotics
- Sylvain Gelly (phd 2007 with O. Teytaud and M. Sebag) : SLAM, genetic prog. (and Go, only w/ O. Teytaud)